Deep Reinforcement Learning
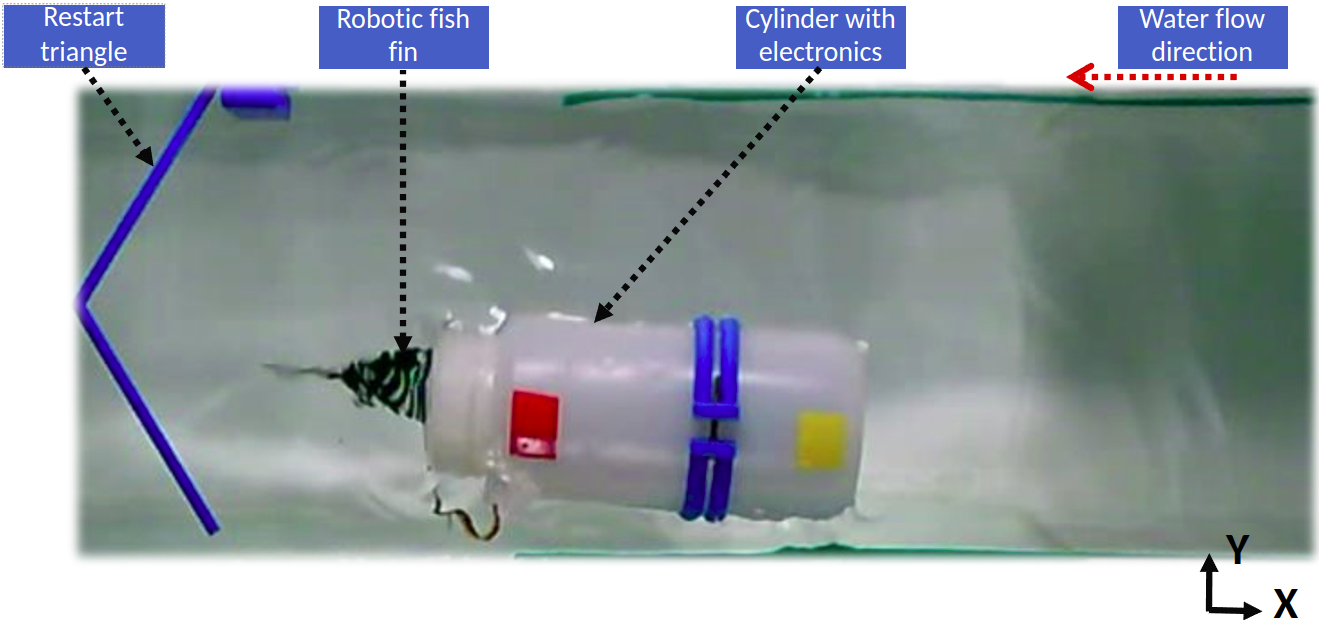
Robotic Fish Swimming Speed Optimization
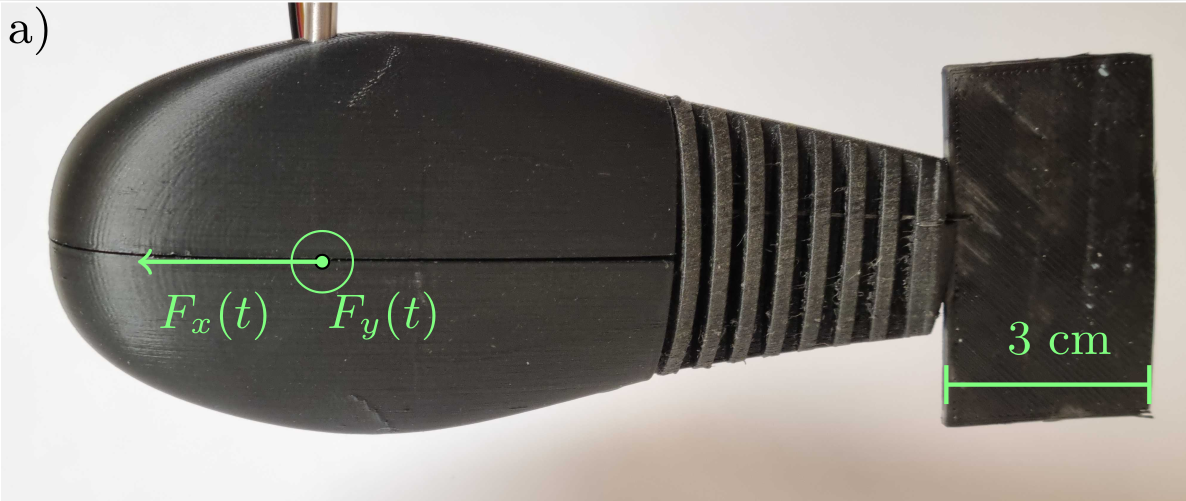
Advanced swimming gait optimization using deep reinforcement learning with integrated computer vision (CNN) and force sensors (FCN). Real-time control system incorporating IMU and LIDAR sensors for autonomous navigation.
- Deep RL optimization in simulation (Gym, MuJoCo, COMSOL) and real experiments
- Visual-servoing with VAE coupled with DRL for autonomous control
- Multi-sensor fusion for robust underwater navigation
- Real-time performance optimization and gait adaptation
Python
PyTorch
OpenAI Gym
MuJoCo
Computer Vision
VAE